
일정: 2023.12.18(월)
수업 내용:
- Robot Operating System (ROS)
- ROS 개발환경 구축
- Autonomous Driving
목표:
로봇 소프트웨어 플랫폼
(하드웨어 추상화, 하위디바이스 제어, 로보틱스 센싱, 인식, 위치추정, 지도 작성 , 내비게이션 등) 중심의 기술과
로봇 소프트웨어 플랫 폼(ROS)이 가져올 미래 가치와 기술 선점을 위한 교육을 바탕으로
다양한 영상과 라이다 기반의 로봇 자율주행 기술 교육을 통해 학생들의 첨단 기술습득을 목표로 함.
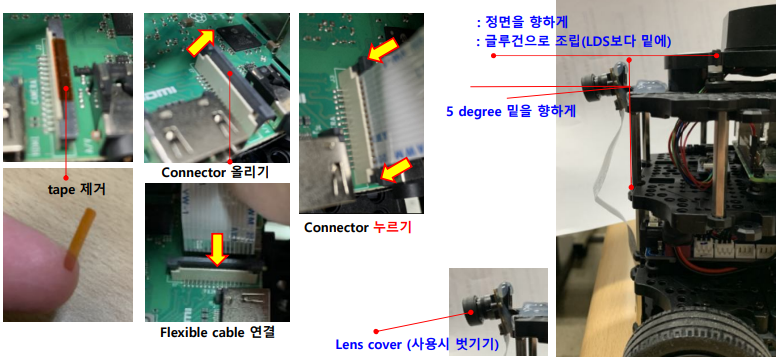
8-1. RPi Camera(G) - Fisheye Lens 연결하기
(1) RPi Camera(G) - Fisheye Lens specification
- supports all revisions of the Pi
- Fisheye Lens, Angle of View : 160 degree (while other normal cameras are typically 72 degree)
- 5 megapixel OV5647 image sensor
- CCD size : 1/4inch
- Aperture (F) : 2.35
- Focal Length : 3.15mm
- Sensor best resolution : 1080p
- Provides 3.3V power output

(2) RPi Camera(G) - Fisheye Lens를 Turtlebot3에 조립 및 Raspberry PI 3 B+ 연결
- Camera USB interface
: USB video device class (UVC) 라고 정의 함
→ USB video device class Ref. https://en.wikipedia.org/wiki/USB_video_device_class
- USB camera package
: libuvc-camera - UVC 표준 카메라 사용 위한 인터페이스 패키지
: uvc-camera - 상세 카메라 설정 변경 기능
- 카메라 두 대를 이용하여 스테레오 카메라 활용 가능 패키지
: usb-cam - Bosch에서 사용 카메라 드라이버
: freenect-camera, openni-camera, openni2-camera
- Kinect나 Xtion과 같은 심도 카메라

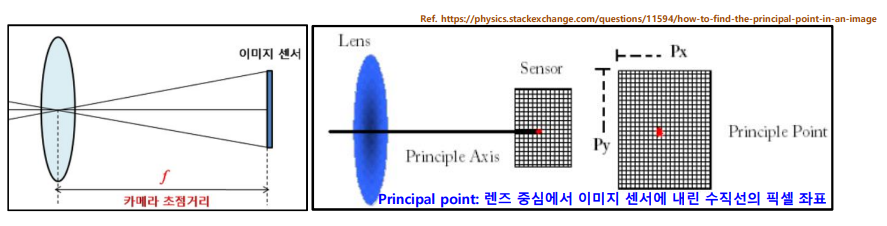
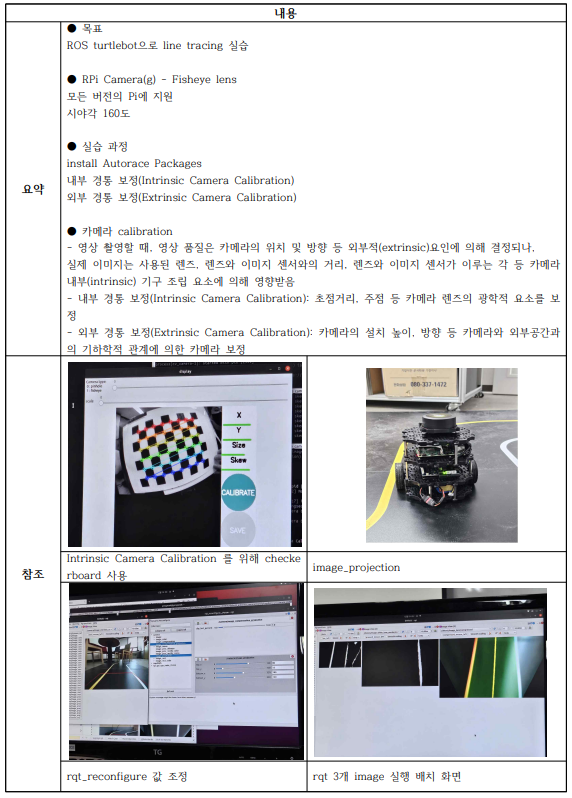
Camera calibration
: 영상을 촬영할 때, 영상 품질은 카메라의 위치 및 방향 등 외부적(extrinsic) 요인에 의해 결정되나,
: 그러나 실제 이미지는 사용된 렌즈, 렌즈와 이미지 센서와의 거리, 렌즈와 이미지 센서가 이루는 각 등
카메라 내부(intrinsic) 기구 조립 요소에 의해 영향 받음.
→ intrinsic calibration - 초점거리(focal length), 주점(principal point) 등 카메라 렌즈의
광학적 요소를 보정(calibration)을 의미
→ extrinsic calibration - 카메라의 설치 높이, 방향(tilt) 등 카메라와 외부 공간과의 기하학적 관계에 의한 카메라 보정
Camera calibration
: camera calibration parameter
→ camera image calibration - imaging 보정
→ intrinsic calibration - 초점거리(focal length), 주점(principal point) 등 카메라 렌즈의 광학적 요소를 보정(calibration)을 의미
→ extrinsic calibration - 카메라의 설치 높이, 방향(tilt-기울기) 등 카메라와 외부 공간과의 기하학적 관계에 의한 카메라 보정
: intrinsic calibration parameter, extrinsic calibration parameter 를 camera matrix 라고 부름
: parameter 경로
→ intrinsic calibration
catkin_ws / src / turtlebot3_autorace_2020 / turtlebot3_autorace_camera / calibration / intrinsic_calibration
→ extrinsic calibration
catkin_ws / src / turtlebot3_autorace_2020 / turtlebot3_autorace_camera / calibration / extrinsic_calibration
'[Intel] 엣지 AI SW 아카데미 > 펌웨어 프로그래밍 75hour' 카테고리의 다른 글
| [Intel] 엣지 AI SW 아카데미 38일차 (부산상공회의소 인력개발원) (1) | 2023.12.20 |
|---|---|
| [Intel] 엣지 AI SW 아카데미 38일차 (부산상공회의소 인력개발원) (0) | 2023.12.19 |
| [Intel] 엣지 AI SW 아카데미 30일차 (부산상공회의소 인력개발원) (1) | 2023.12.17 |
| [Intel] 엣지 AI SW 아카데미 29일차 (부산상공회의소 인력개발원) (1) | 2023.12.17 |
| [Intel] 엣지 AI SW 아카데미 28일차 (부산상공회의소 인력개발원) (0) | 2023.12.17 |



